Project Description:
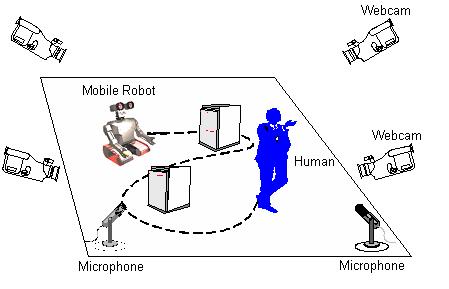
Intelligent space is a concept which fuses global information using sensors and actuators to take intelligent operational decisions for applications like robot navigation, tele-operation, remote surgery, manufacturing plant monitoring etc. iSpace Concept
ADAC lab has developed a prototype of iSpace as a network based integrated navigation system which is a subset of network based multi sensor multi-large scale actuator mechatronic systems. This whole system is used a research platform for many research topics such as network based control systems, path planning for robot navigation, bandwidth allocation, scheduling, network security, collaborative control.
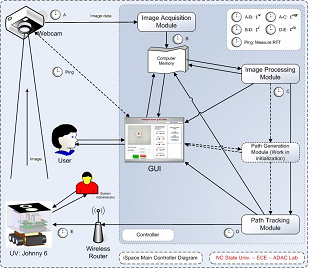
The focus of this research is path planning navigation for the unmanned ground vehicle in a network based navigation system. Details of the project and the implementations can be found in the dcument section.
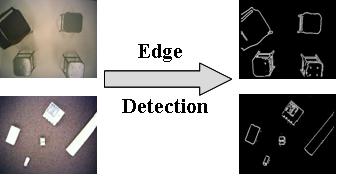
Edge Detection
Harmonic Potential Field
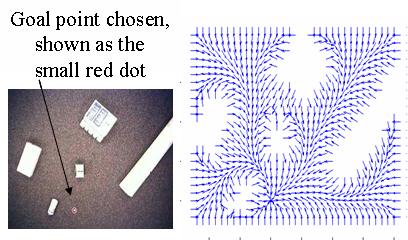
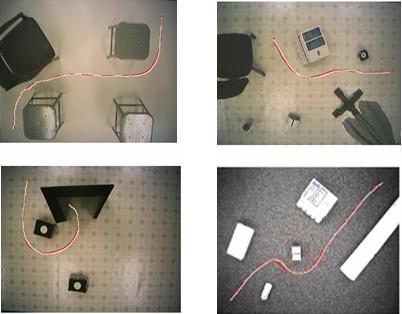
Path Planning