Project Description:
In this project a predictive gain scheduler for robot path tracking control in a networked control system with variable delay is being developed. The controller uses the plant model to predict future position and find the amount of travel possible with the global path as a constraint. Based on variable network conditions and vehicle trajectory’s curvature the vehicle is allowed to travel farther with the same control input as long as the vehicle trajectory matches the path constraint. With this method path specific characteristics are used to evaluate the effectiveness of each generated control signal. By scheduling the gain on the control signal the vehicle tracking performance is maintained with an increase in network delay. The tracking time is decreased compared to other methods since the proposed control method allows controller to look farther down the path to evaluate predicted effect of each control signal before scaling it.
The gain scheduling middleware concept can be illustrated using the diagram below. When controlling a remote system over a network the delay caused by the network affects both the control signal and the feedback signal. When feedback arrives at the controller the feedback signals have been delayed by the network. The feedback preprocessor compensates for this by using the remote system model to predict what the feedback values will be when the next control value arrives. This preprocessed, predicted feedback is used by the controller to generate control commands. In this project the controller is a quadratic curve path tracker.
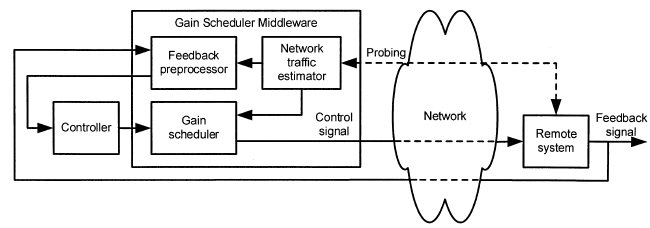
The control signal is then scaled using a gain table based on certain system parameter such as network delay and path curvature. In predictive constrained gain scheduling the composition of this gain table is uniquely tuned to increase path tracking performance.
Predictive Constrained Motion
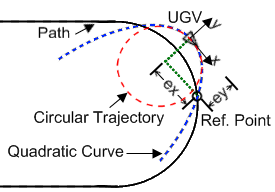
When a UGV is tracking a path the motion of the UGV is predicted using the control value and the UGV model. The predicted position is calculated iteratively until the UGV prediction exits a safety region defined around the path. The point where the UGV exits the safety region is the point where the control value loses it’s effectiveness. The predicted position, which is constrained by the future path, is then used to determine how far the UGV is allowed to travel before it needs to get an updated control signal. This distance is then used as another parameter in gain scheduling allowing the UGV to travel further.
{kind=link}
{kind=link}
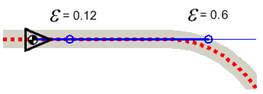
When the UGV is allowed to travel further the epsilon value increases. A gain table for scaling control signals is computed for the epsilon value so that the UGV is allowed to travel a distance of epsilon. The gain table will decrease the control signal such that the UGV will not begin to deviate from the path while tracking complex paths with network delay. Several gain tables for different epsilon values can be seen below.
