by chow | Sep 27, 2010 | Internships
About the Project
The project aims to emulate common traffic scenarios on the road scenario using four Lego Mindstorms Robots.The algorithms implemented states of the robot,simulated in the simulink already, defining the robot behaviors.Each robots is assigned a specific priority to avoid traffic accidents.
Documentations
by chow | Sep 27, 2010 | Internships
About the Project
This project aims at building online instruments that can transmit sampled voltage, load current and temperature of a PHEV Li-ion battery to laptop via ZigBee wireless network, and to Manicipal Parking Lot Charging Station via Internet.
Documentations
by chow | Sep 27, 2010 | Completed projects
There is a need to address potential problems due to the emergence of technologies that will affect the utility industry in a time horizon of less than 20 years. One such technology is the plug-in hybrid electric vehicle (PHEV); the emergence of these vehicles in the marketplace poses a potential threat to the existing power grid. With a large number of these vehicles ‘plugged-in’ for charging, in the absence of control over the power drawn, the additional load can result in grid instabilities and disruptions. As a solution to alleviate such a situation and to allow for smooth integration of PHEVs into the grid, an “intelligent energy management system” (iEMS) is proposed in this project. The iEMS intelligently allocates power to the vehicle battery chargers through real time monitoring and control, to ensure optimal usage of available power, charging time and grid stability. This project is in collaboration with the FREEDM Systems Center and the Advanced Transporation Energy Center, NCSU, Raleigh.
Theoretical Focus:
The research work in this project aims to provide the conceptualization of the system architecture and the definition of its components, their attributes and interactions for enabling PHEV integration. The theoretical system description is implemented on a simulation test-bed for simulating myriad real world scenarios. Work is also ongoing to provide a mathematical framework for developing the iEMS algorithm for the optimal power allocation strategy under utility power constraints; taking into consideration the vehicle battery parameters and user preferences.
Demonstration Focus:
The system performance will be validated in a real world deployment with the implementation of the iEMS algorithm using actual vehicle batteries and in the presence of an enabling communication network. As a beginning step towards this, an experimental setup consisting of a Labview based GUI (with iEMS code) has been developed. The GUI monitors simulated batteries in ZigBee communication nodes and controls the charging process via wireless communication.
Documentations
Links
by chow | Aug 27, 2010 | Completed projects, Research and Projects
In this project a predictive gain scheduler for robot path tracking control in a networked control system with variable delay is being developed. The controller uses the plant model to predict future position and find the amount of travel possible with the global path as a constraint. Based on variable network conditions and vehicle trajectory’s curvature the vehicle is allowed to travel farther with the same control input as long as the vehicle trajectory matches the path constraint. With this method path specific characteristics are used to evaluate the effectiveness of each generated control signal. By scheduling the gain on the control signal the vehicle tracking performance is maintained with an increase in network delay. The tracking time is decreased compared to other methods since the proposed control method allows controller to look farther down the path to evaluate predicted effect of each control signal before scaling it.
The gain scheduling middleware concept can be illustrated using the diagram below. When controlling a remote system over a network the delay caused by the network affects both the control signal and the feedback signal. When feedback arrives at the controller the feedback signals have been delayed by the network. The feedback preprocessor compensates for this by using the remote system model to predict what the feedback values will be when the next control value arrives. This preprocessed, predicted feedback is used by the controller to generate control commands. In this project the controller is a quadratic curve path tracker.
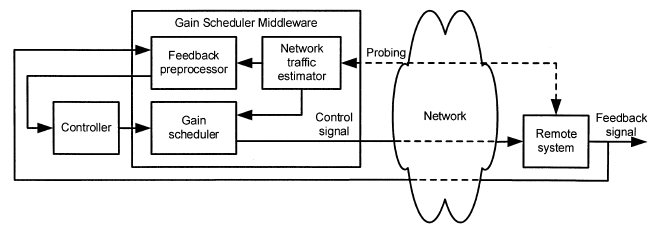
The control signal is then scaled using a gain table based on certain system parameter such as network delay and path curvature. In predictive constrained gain scheduling the composition of this gain table is uniquely tuned to increase path tracking performance.
Predictive Constrained Motion
When a UGV is tracking a path the motion of the UGV is predicted using the control value and the UGV model. The predicted position is calculated iteratively until the UGV prediction exits a safety region defined around the path. The point where the UGV exits the safety region is the point where the control value loses it’s effectiveness. The predicted position, which is constrained by the future path, is then used to determine how far the UGV is allowed to travel before it needs to get an updated control signal. This distance is then used as another parameter in gain scheduling allowing the UGV to travel further.
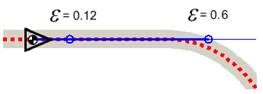
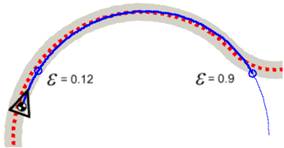
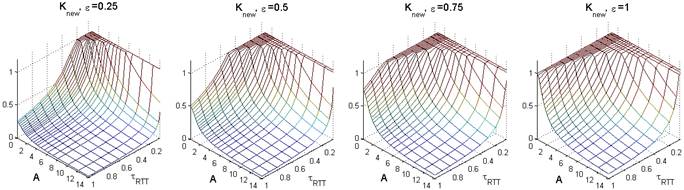
When the UGV is allowed to travel further the epsilon value increases. A gain table for scaling control signals is computed for the epsilon value so that the UGV is allowed to travel a distance of epsilon. The gain table will decrease the control signal such that the UGV will not begin to deviate from the path while tracking complex paths with network delay. Several gain tables for different epsilon values can be seen below.
by chow | Sep 30, 2007 | Completed projects
Project Description:
Biological and chemical compound screening for new drug discovery is an emerging industry with the potential to improve the quality of human life. The need for High Throughput Screening (HTS) process of organic or synthetic compounds for investigating the effects on human cell functions has become increasingly important as a result of recent life threatening epidemics, ranging from SARS (Severe Acute Respiratory Syndrome) to terrorist threats (including poisoning by chemical agents.
Challenges:
- Current HTS process is planned and set up by operators according to the dynamically changing demand. Mainly making decision based on their experience, the operators may have wrong analysis results and prediction on the HTS process performance. The overall performance can be downgraded.
- Current HTS process is lack of equipments and methods that can help the operators to observe the real-time status of the system.
- Current HTS processes are mainly locally operated and monitored. Effectiveness and efficiency of HTS process are limited by the physical existance of the experts and the testing agents.
Goals:
- Providing the capability of HTS process modeling and enabling the dynamic scheduling of human/equipment resources.
- Developing the capability for automated monitoring of the status of HTS process in order to reduce operator workload and increase the number of processes that can be managed by a single operator (i.e., the overall productivity of testing facilities).
- Providing network-based access to HTS process for developing nations and new biotechnology companies in order to promote the creation of medicines, vaccines, etc. to deal with new diseases, biological and chemical threats by terrorists and to promote the effectiveness and efficiency of use of screening processes.
Documentations
Links