Distributed Intelligent Energy Management for Smart Microgrids
Project Description:
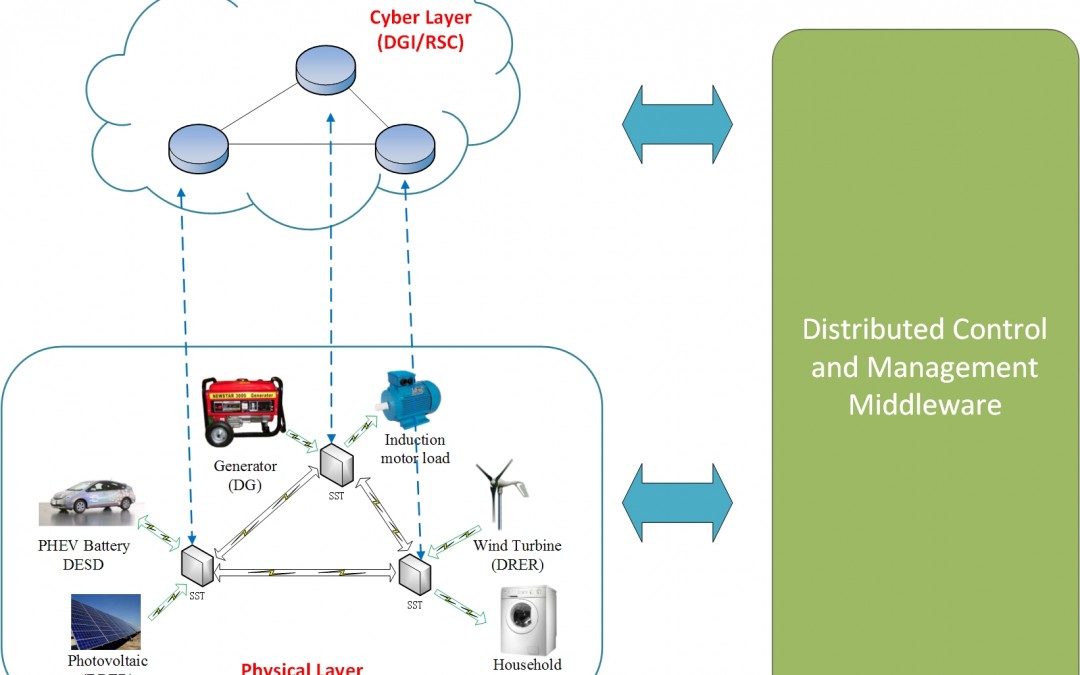
The efficiency, reliability, economics and sustainability of the production and distribution of electricity are the major concerns of all the power utilities and customers. Without large investments in new transmission capacity and generation sources to keep up with the growth in demand and corresponding investment, the existing early-twentieth-century-designed power grids would face a lot of challenges. An innovative and economical way of solving these challenges is the introduction of “microgrid” concept. Microgrids are electricity distribution systems consisting of local loads and distributed energy resources such as distributed generators, storage devices, and responsive demands as cheap spinning reserves. This flexibility of generation and demand available in the microgrids along with the access to renewables, can dramatically improve the power quality and reliability of the power networks at the distribution level. However, economically and intelligently managing these energy resources to improve the power quality, maximize the benefit of the unit owners while ensuring their privacy, requires advanced optimization and control technologies.
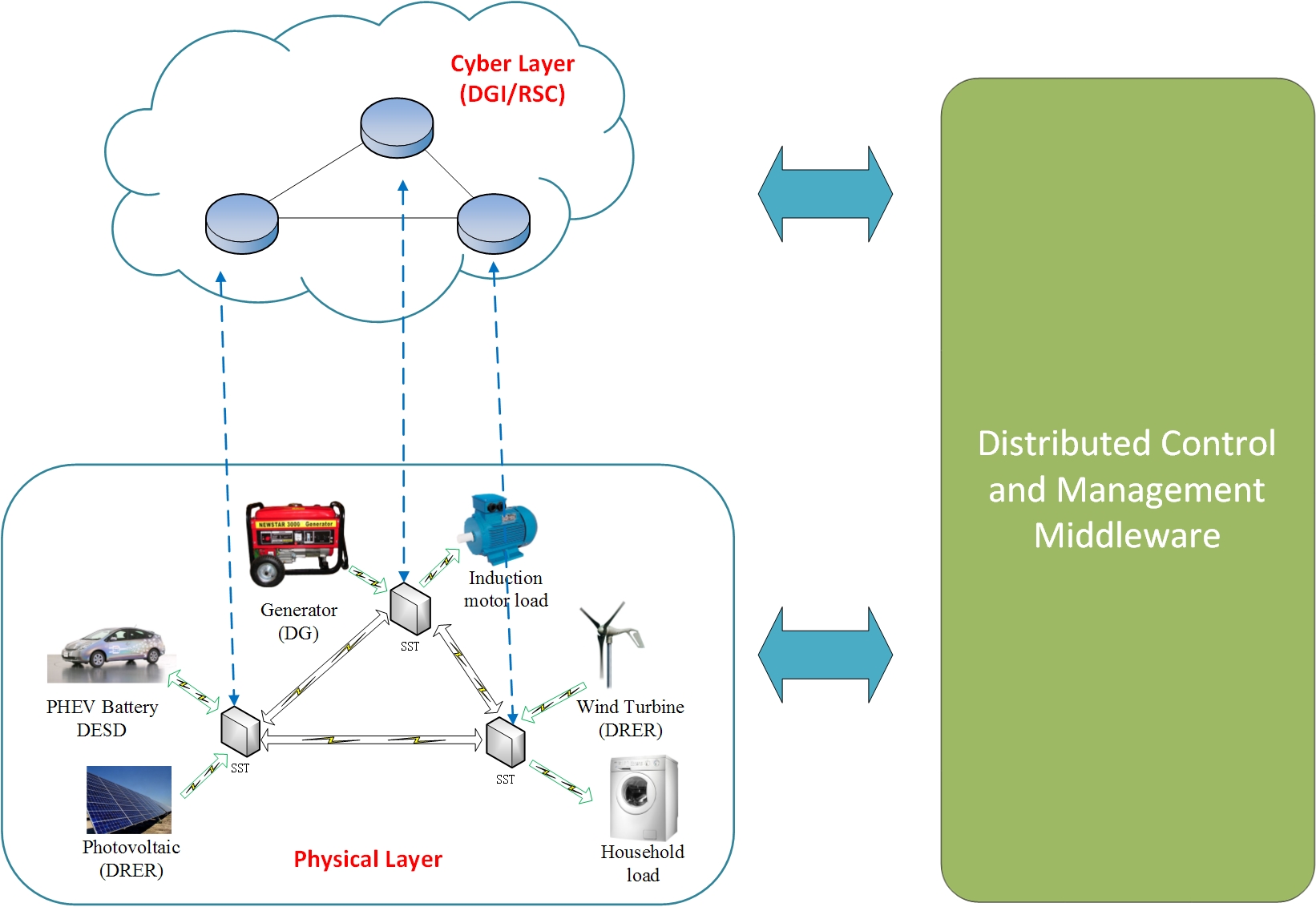
The objective of ADAC Distributed Intelligent Energy Management (DIEM) project is to design a robust cooperative distributed energy management framework for the microgrids to coordinate and schedule energy generation, energy storage and energy demand at different levels to achieve global optimal in terms of economic operation while satisfying the quality constraints. The envisioned framework is scalable, robust to communication imperfections (such as time delay, packet losses), and robust to single point of failures.
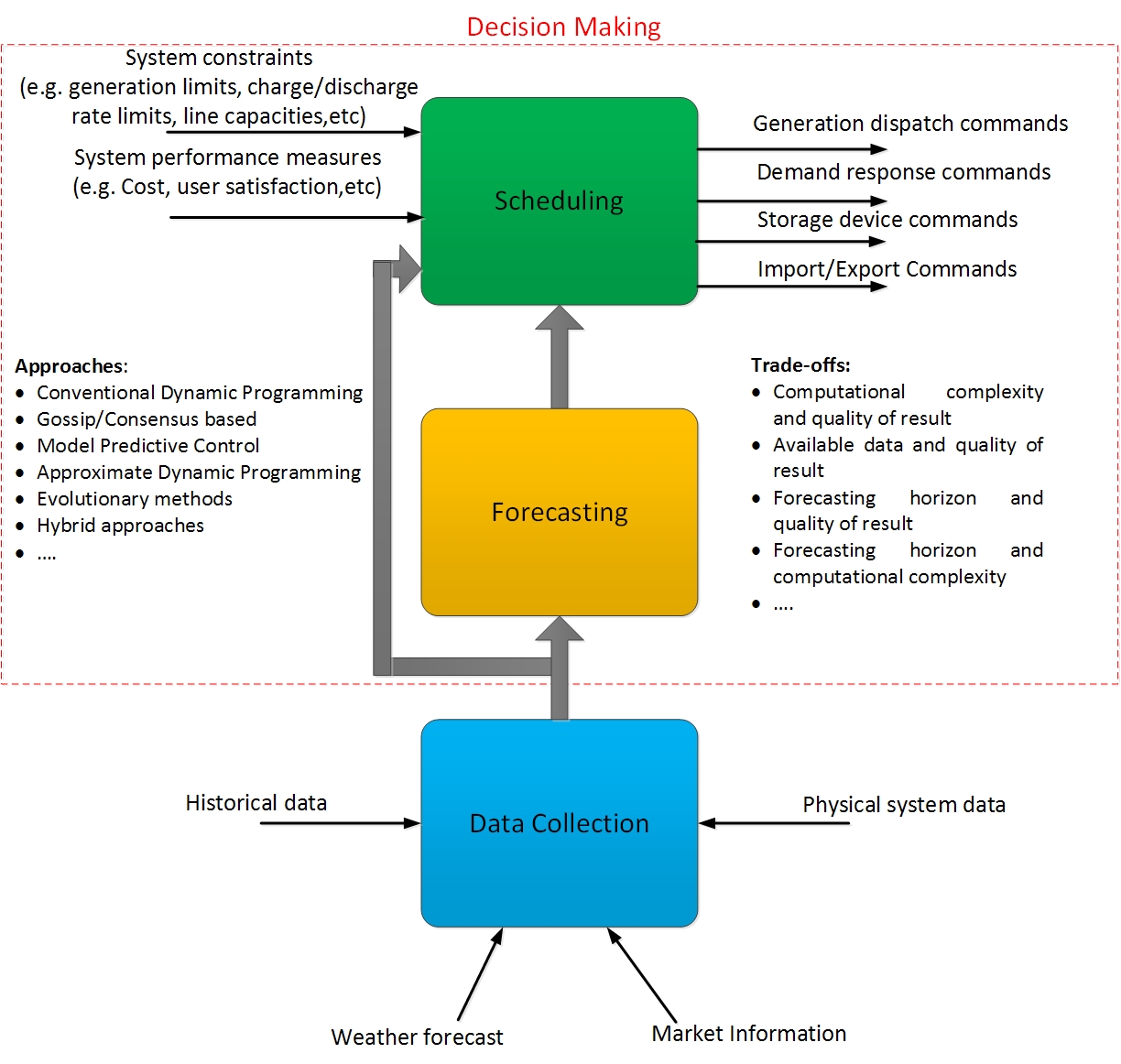
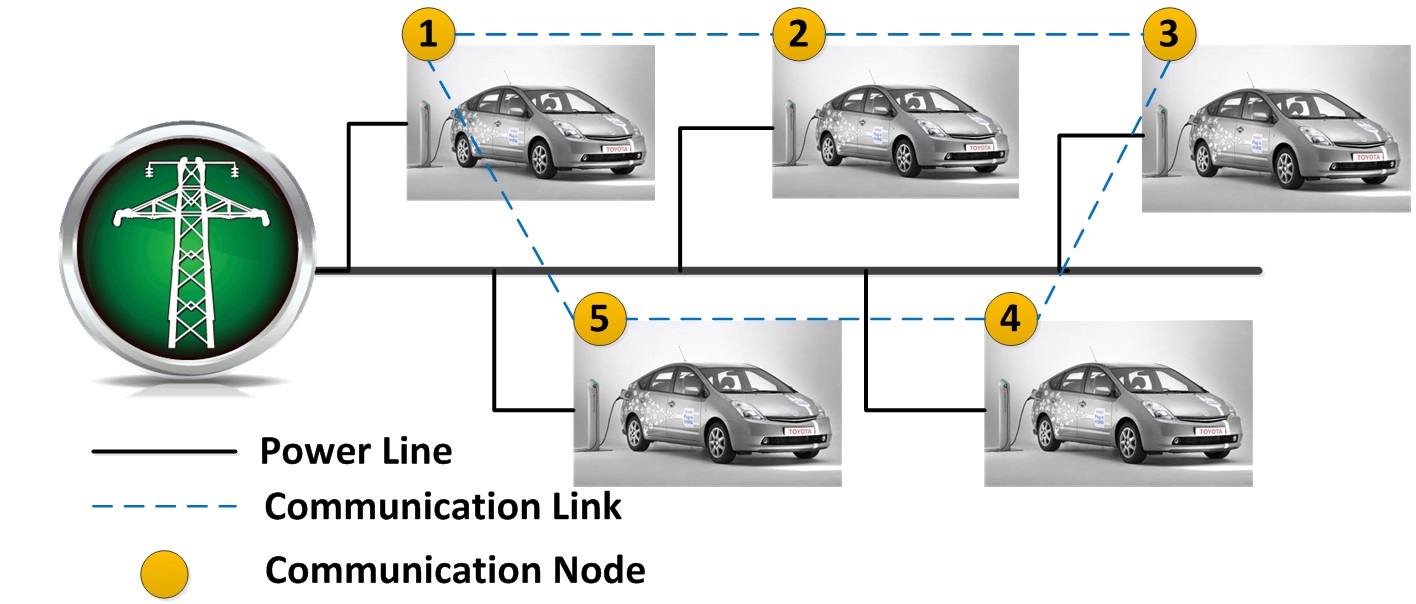
Because of the distributed nature of the controllable devices (e.g., distributed generations and controllable loads), agent-based system modeling is used by utilizing the graph theory. Assuming a two-way communications among distributed controllable devices, the system can be modeled using adjacency matrix based on the availability of communication link between each pair of agents. Based on the communications network, consensus and gossip based algorithm are applied for the development of the DIEM algorithms.
Publications:
- Z. Zhang and M.-Y. Chow, “Convergence Analysis of the Incremental Cost Consensus Algorithm Under Different Communication Network Topologies in a Smart Grid,” Power Systems, IEEE Transactions on, vol. 27, no. 4, pp. 1761–1768, 2012.
- Z. Zhang, Y. Zhang, and M.-Y. Chow, “Distributed energy management under smart grid plug-and-play operations,” in Power and Energy Society General Meeting (PES), 2013, no. Ic, pp. 1–5.
- N. Rahbari-asr, Y. Zhang, and M. Chow, “Stability Analysis for Cooperative Distributed Generation Dispatch in a Cyber-Physical Environment,” in IECON 2014 – 40th Annual Conference on IEEE Industrial Electronics Society, Dallas, TX, USA, 2014.
- Y. Zhang and M.-Y. Chow, “Hybrid Incremental Cost Consensus Algorithm for Smart Grid Distributed Energy Management under Packet Loss Environment,” in IECON 2014 – 40th Annual Conference on IEEE Industrial Electronics Society, Dallas, TX, USA, 2014.
- N. Rahbari-Asr, Z. Zhang, and M.-Y. Chow, “Consensus-Based Distributed Energy Management with Real-Time Pricing,” in 2013 IEEE Power & Energy Society General Meeting, 2013, pp. 1–5.
- N. Rahbari-Asr, U. Ojha, Z. Zhang, and M.-Y. Chow, “Incremental Welfare Consensus Algorithm for Cooperative Distributed Generation/Demand Response in Smart-Grid,” IEEE Transactions on Smart Grid, vol. 5, no. 6, pp. 2836–2845, 2014.
Links:


{kind=link}
{kind=link}